Siamo arrivati al capitolo
forse più importante della nostra presentazione, se non altro
perché è quello che ha richiesto più lavoro.
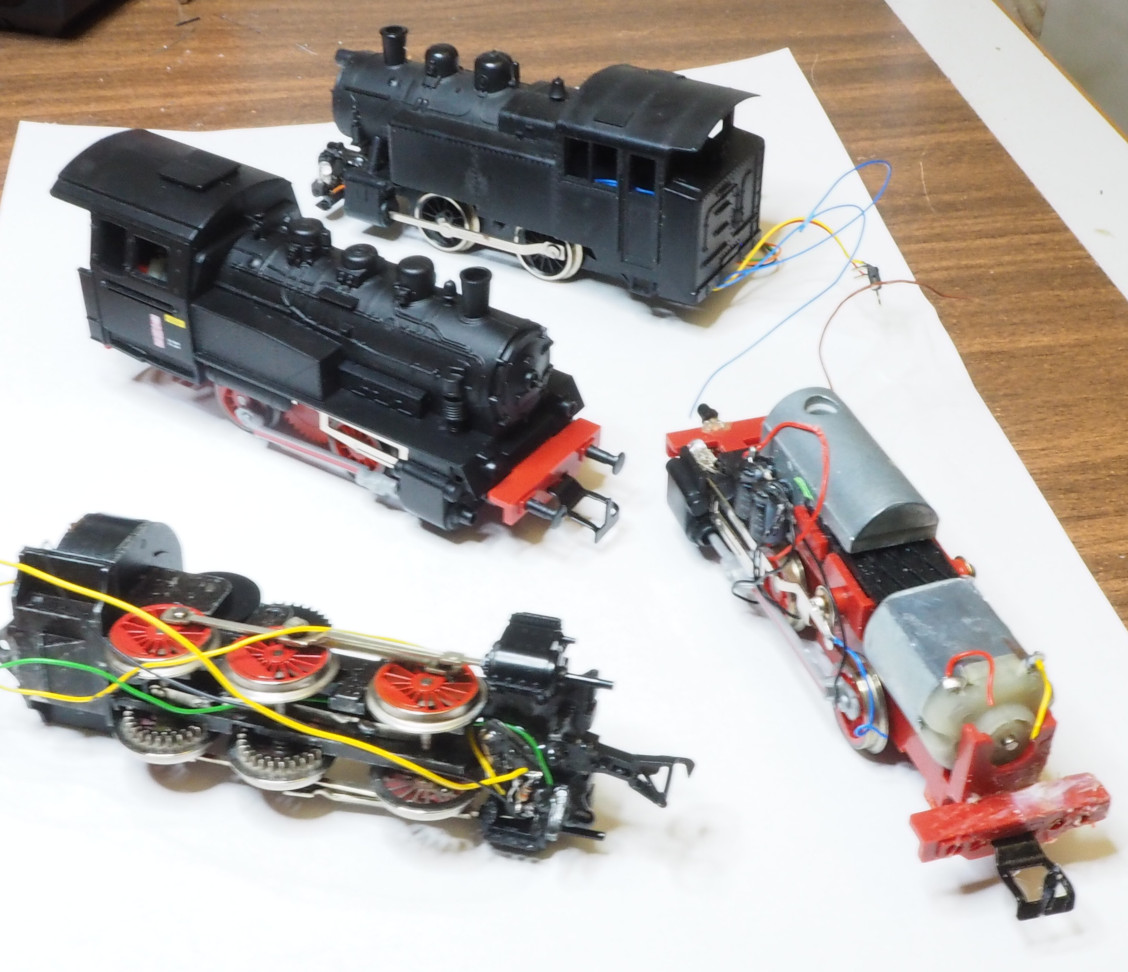
Siamo partiti da vecchie locomotive analogiche e dopo vicende varie, adozione di soluzioni poi prontamente abbandonate, siamo arrivati a stabilire le caratteristiche generali a cui esse devono soddisfare.
Le riassumiamo qui:
Siamo partiti da vecchie locomotive analogiche e dopo vicende varie, adozione di soluzioni poi prontamente abbandonate, siamo arrivati a stabilire le caratteristiche generali a cui esse devono soddisfare.
Le riassumiamo qui:
- Ogni locomotiva preleva l'alimentazione elettrica dai binari costantemente polarizzati con una tensione di 12V.
- Essa contiene a bordo un ponte di diodi in modo da avere una tensione di polarità data quale che sia la sua posizione sui binari.
- Contiene inoltre un regolatore di tensione che genera una tensione costante di 3.3V necessaria per alimentare il microcontroller.
- Ogni locomotiva si muove indipendentemente dalle altre potendo variare a piacimento la velocità e il verso.
- A tale scopo essa è dotata di un microcontroller connesso ad una rete WIFI appositamente predisposta. Accetta quindi comandi e manda informazioni ad un monitor centralizzato.
- Il microcontroller oltre a dialogare col mondo esterno, processa i segnali d'allarme (solo semafori per il momento), misura la velocità della locomotiva, che trasmette al monitor remoto.
- La velocità viene stabilizzata dal microcontroller con un loop di controllo che usa in ingresso la velocità misurata.