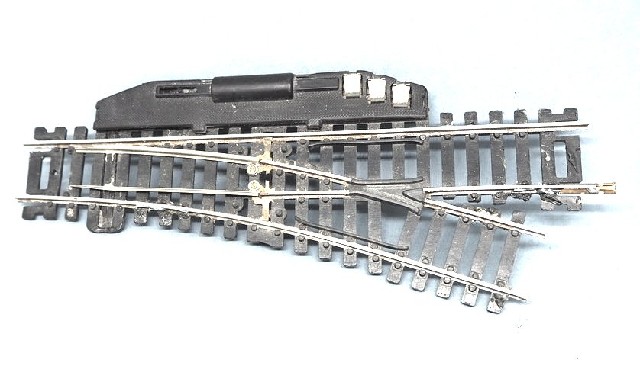
Come detto in precedenza, in un primo momento avevamo deciso di utilizzare
gli scambi così come acquistati su EBAY. Si tratta di scambi come quello
mostrato nella figura seguente.
Scambio
LIMA non modificato
Si può vedere, lateralmente, l'orrido alloggio delle bobine usate per il
comando remoto. Peggio ancora sono i morsetti per il collegamento dei
conduttori.
In questi scambi la commutazione da una posizione all'altra è ottenuta
eccitando la bobina corrispondente alla posizione desiderata con un impulso
di corrente di lunghezza finita. Una eccessiva durata causerebbe infatti danni
irrimediabili agli avvolgimenti.
Questo modo di operare non è compatibile col sistema di controllo da noi
adottato che prevede che un unico livello logico (Arduino DIO LOW o HIGH)
determini lo stato dello scambio. Inoltre l'unico modo di conoscere lo stato
dello scambio consiste nel guardarlo direttamente.
Abbiamo risolto il primo problema realizzando un driver di cui, nella figura
seguente mostriamo lo schema elettrico.
Non c'è soluzione invece al secondo problema; lo stato degli scambi sul pannello del sistema di controllo viene ricostruito a software sulla base dei comandi inviati (sperando che tutta abbia funzionato a dovere).
Schema elettrico del driver degli scambi. Tutti i
transistor sono BC517 e le resistenza da 5.6 k. L1 ed L2 sono i due avvolgimenti che comandano lo scambio.
Non vorremmo entrare in eccessivi dettagli sul funzionamento di questo circuito; mostriamo solo l'andamento della corrente conseguente alla salita, da LOW ad HIGH, dello stato in ingresso. La transizione opposta, da HIGH a LOW, genera lo stesso impulso di corrente sull'altra bobina.
Tensione di ingresso (in alto) e relativa corrente nella bobina L1.
Come si vede l'impulso di corrente ha un ampiezza di circa 3 A e una durata, determinata dalla costante di tempo del condensatore C1 (o C2 per la bobina L2), di meno di 30 ms.